
The previous video series began as a documentation of environment art. The work below documents my process of creating an avatar through which users may traverse and interact with those environments.

Documentation, Physicalized Frames 2019
Still, Physicalized Frames 2019

Still, Physicalized Frames 2019
Rig Development Documentation, 2021

Rig Development Documentation, 2021
Rig Development Documentation, 2021

Rig Development Documentation : Mask Sketch, 2021
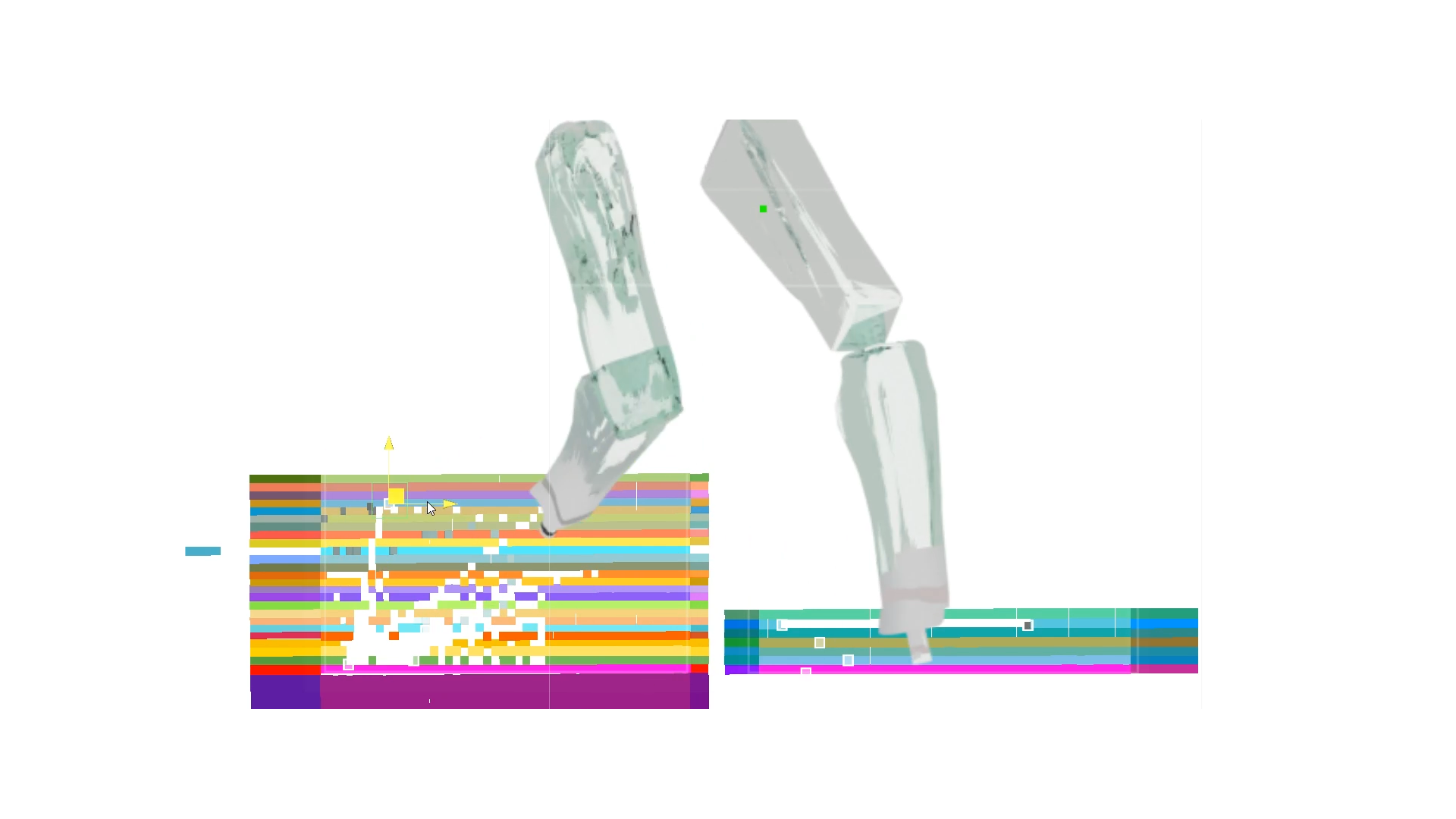
Rig Development, Magnitude Clamp, 2021
The rig is a multi-layered system full of nested objects. Each segment of the body is represented by two points. These two empty objects act as virtual joints. Their relationship is defined by a script that clamps the magnitude between the two points and draws a line from point A to point B, rendering the body. When the maximum magnitude is reached a coroutine runs to prevent point B from straying to far from point A.
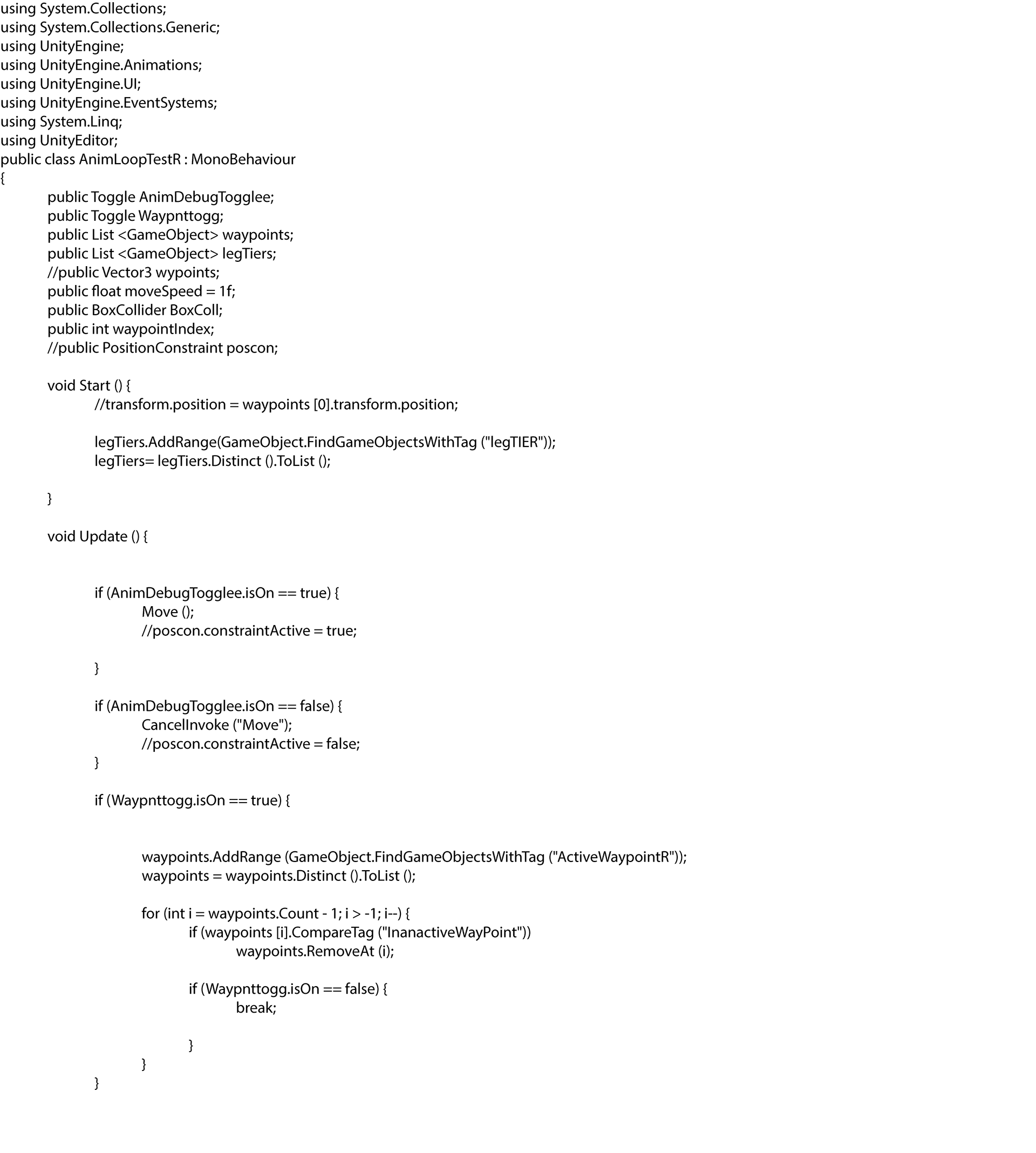
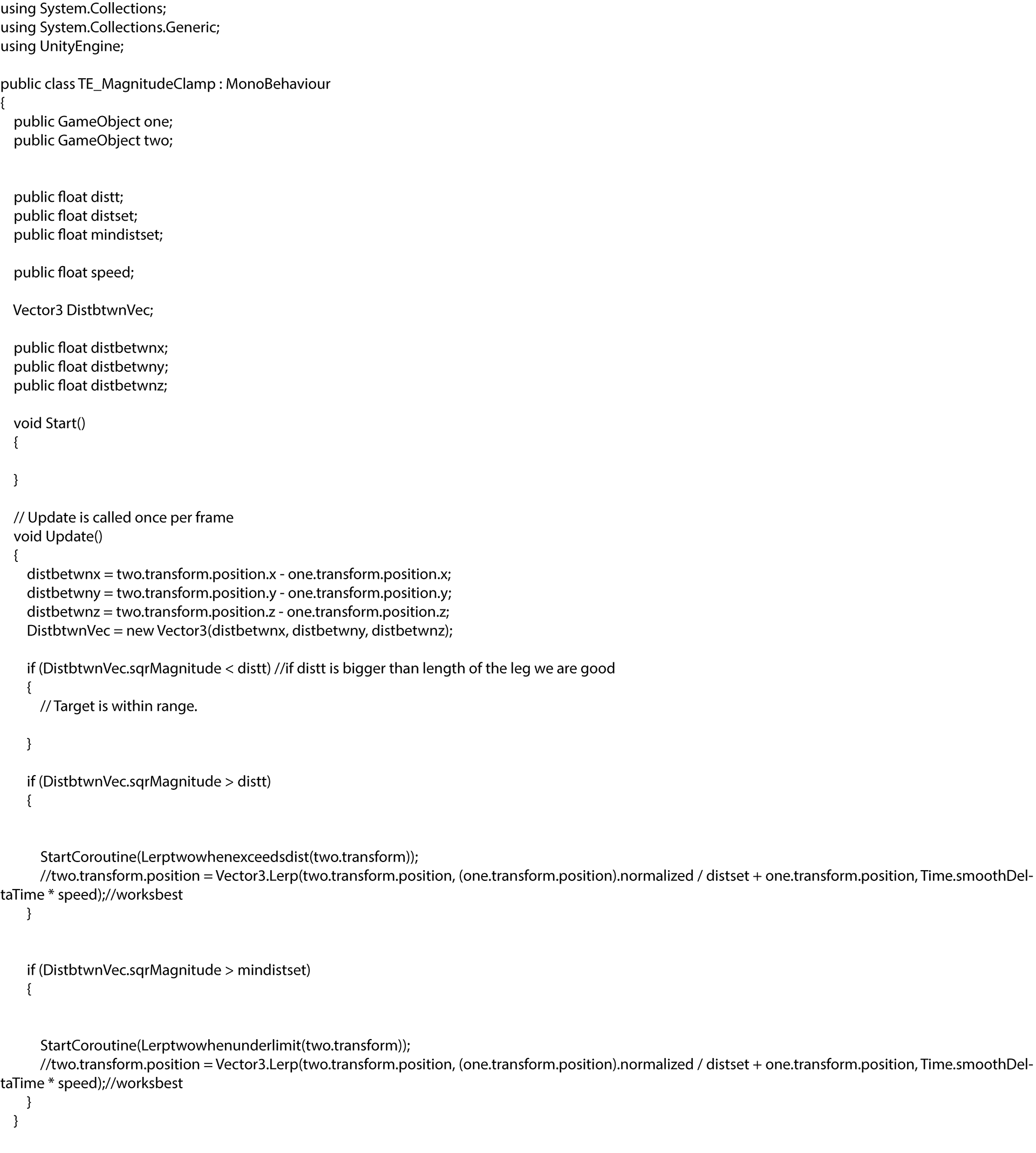
Physicalized Frames, Sample Code, 2019
The above code is documentation of the system that allows the automata to move between waypoints placed on the matrices of frames.